Huggy Bear
Nov 13, 2016
Meet Huggy Bear, my unique new autonomous mini sumo bot. Instead of the usual plow or wedge it uses spinning foam paint rollers to lift opponents off the ring and then push them off. Also it uses doppler radar to locate opponents because radar doesn't care what color you paint your bot.
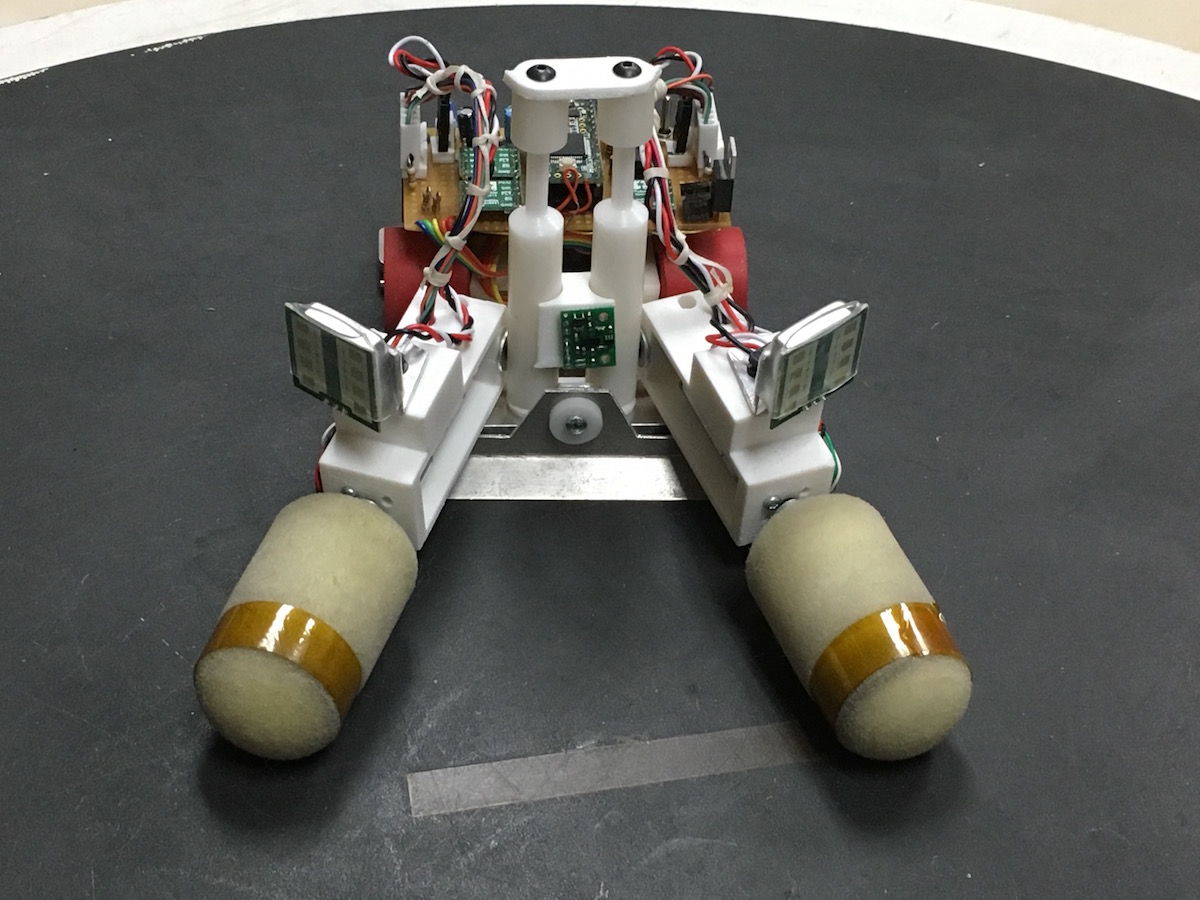
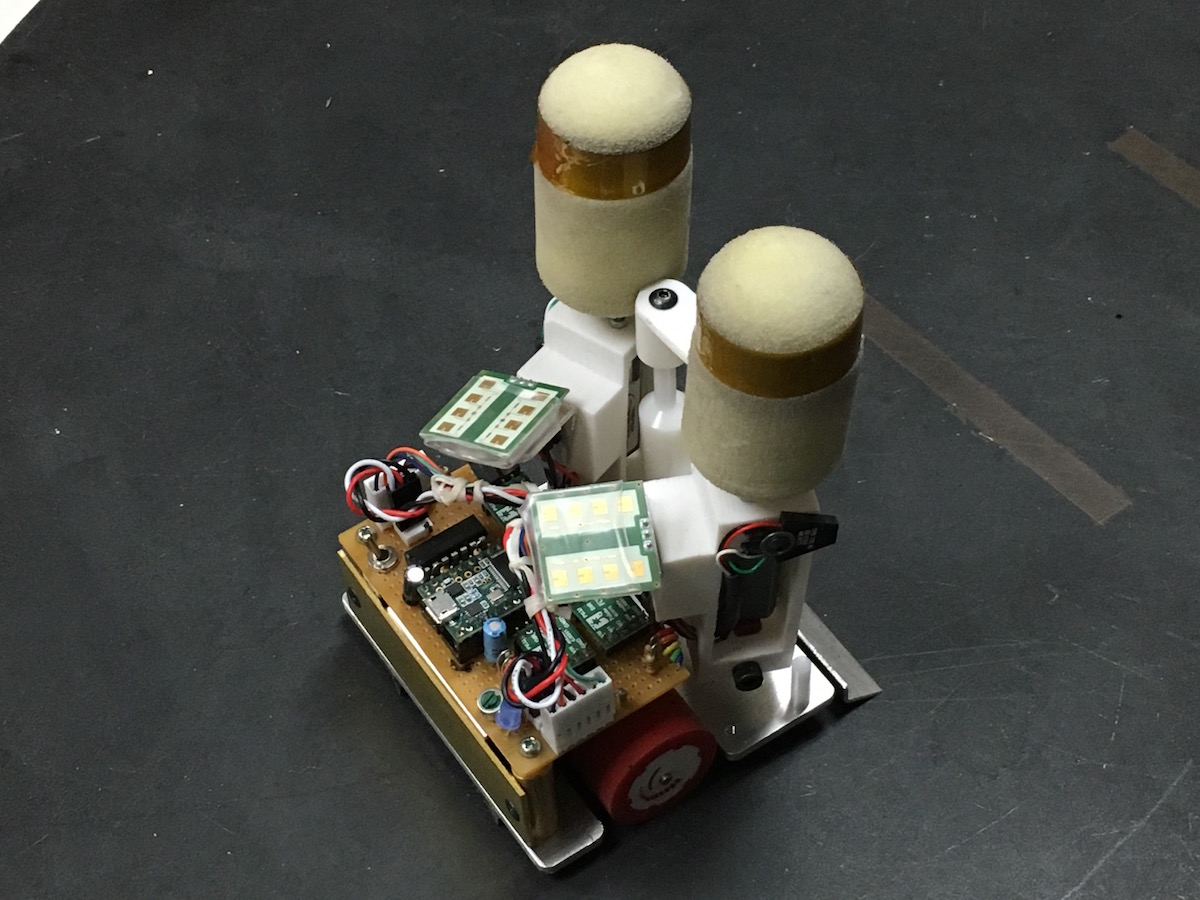
At start-up mini sumo bots must fit within a 10 cm square but height is unlimited. After starting they may expand. Below is the bot in its starting position with rollers stowed in an upright position. After the 5 second startup delay the rollers start spinning at 140 RPM and literally roll themselves off the small plastic retainer between them and drop to the surface. The kapton tape on the ends reduce friction.
The bots brain is a Teensy 3.2 . It's got a 32 bit ARM processor running at 96 mhz. 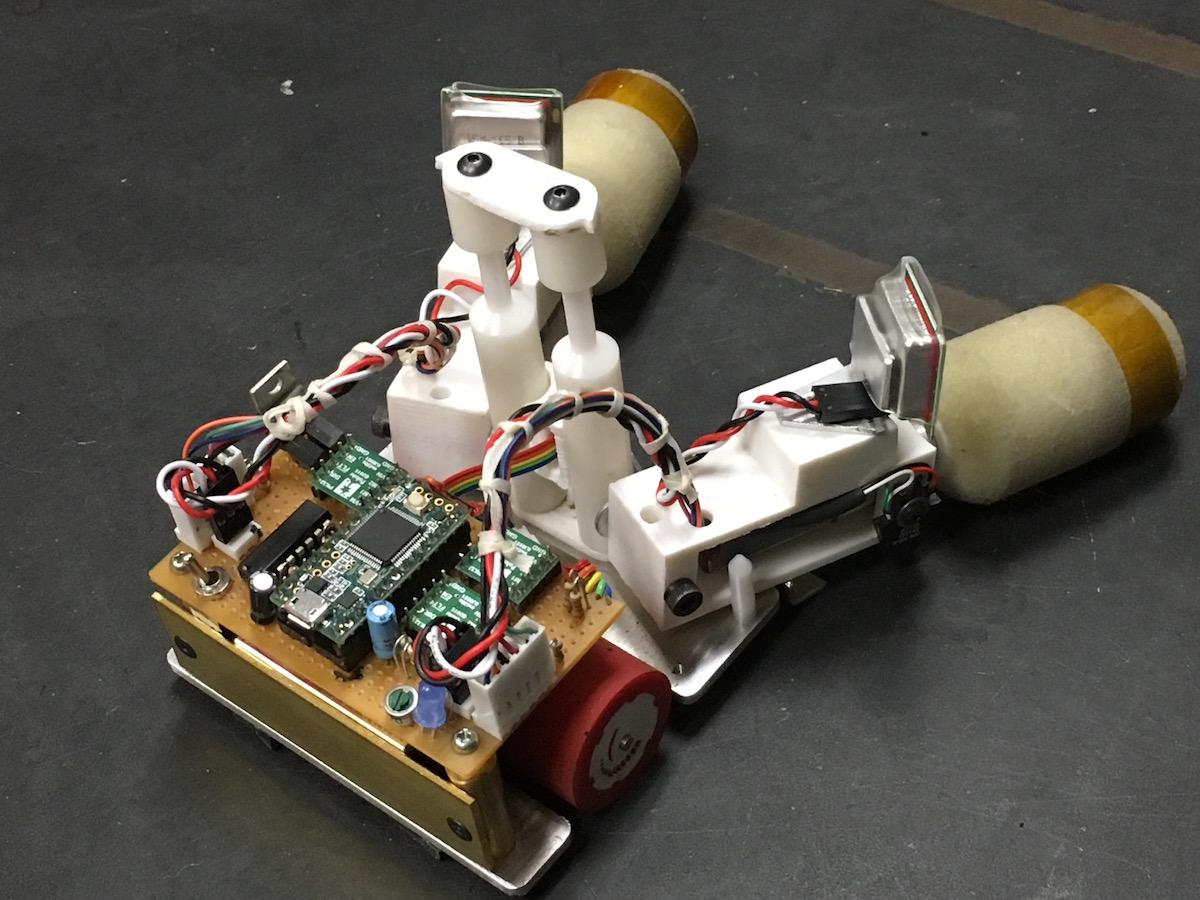
Opponent detection is done with a pair of 24 gHz Doppler motion detector radars (RSM-1650) mounted above each roller. The radars output an audio frequency signal. The frequency is proportional to the relative speed of the target and the amplitude depends on target size and distance. The doppler frequency to speed relationship is defined by this formula.
Speed (feet/sec) = .0204 * frequency(Hz)
1 foot/sec = 49Hz
The signals are amplified by a pair of op-amps to bring the levels up to a volt or so then all other filtering and processing is done digitally in the microprocessor. Since the radars only respond to relative motion I added a tiny VL53L0X optical distance sensor to indicate when the opponent was captured between the rollers. When that happens it applies full power to the wheels.
Motors are controlled with Pololu #2961 H-Bridge modules using locked antiphase PWM. The whole thing is powered by a single lithium 9 volt battery.
So, how well does this strange contraption work you ask? Can paint rollers really beat wedges? I've tested it against Delta Force, my other mini sumo and, YES, it wins every time. I'll be testing it against other opponents on Nov. 19, 2016 at the AHRC Robot Rally.
Watch the 240 fps slo-mo video below.
Huggy Bear vs Delta Force at normal speed
YouTube video of Huggy Bear matches at 2016 AHRC Robot Rally
For the technically curious here's a link to the schematic and Arduino source code.
Hit Counter = 16729
Previous page: Pushy Grabber
Next page: Noodles
