Invertabot 12# Combat Robot


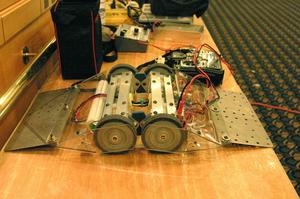
Invertabot is a 12 pound combat robot. It's built to compete in Robot Battles at Dragon*Con. This is a sumo event. The objective is to push your opponent off the combat surface or disable him. For safety powerful destructive weapons are not allowed. Invertabot has very thin armor but posseses a powerful front mounted flipper. It can also run both ways up. It's powered by R/C car motors modified to run on 24 volts.
Robot Battles combat surface is a raised platform only 12 by 8 feet in size covered with low pile carpet. Invertabot has spikes on the front and rear that dig into the carpet when lifted to prevent being pushed. The spikes also will often dig into opponents skirts and wedges allowing Invertabot to push them instead of riding up and over.
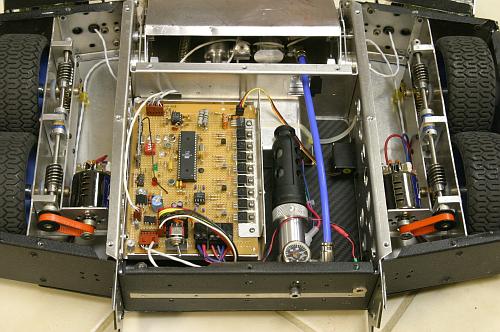
Invertabot has many custom machined parts including the 800 psi air cylinder. The complete log of the building process is available here. You may also view a short video of Invertabot flipping objects and autonomous driving.
I did all the machine work in my back yard shop. I have a lathe, vertical mill, band saw, drill press, sheet metal brake, shear and other tools.
| News Sept 6 2004: Invertabot took second place at the 2004 Robot Battles at Dragon Con. The first fight was with a low wedge called FlatIron by Team PNP. It was an exciting match with lots of pushing, shoving and flipping. The rear spikes proved their worth many times by locking Invertabot in place when FlatIron got under the front. Invertabot prevailed and we moved on to the next match with Dagger by Blade Robotics. This consisted of two quick rounds with Dagger being pushed off the stage both times. Next we were up against "Other Shadow", a small two wheel non-invertable wedge. Again we prevailed by shoving the opponent off the stage twice. This brought us to the finals against Charles Guan of Team TestBot. Yes, this is the same guy that gave us such a hard time in the finals last year. This time TestBot quickly pushed Invertabot off twice in succession and we lost. Charles seemed to be in a state of shock. After five losses and zero wins against Invertabot he couldn't believe he actually won. Invertabot will now retire and a new bot will be designed for next year. Aug 2004: Invertabot has been modified for the upcoming 2004 DragonCon Robot Battles event. I changed the drive system and the controller. The power is from two series connected 7.2 volts 3300 mah RC car packs instead of 24 volts. The motors are 14 volt 30,000 rpm size 550 for RC monster trucks. No rewinding required! I also removed the IR opponent detector and servo wedge lifter because they were not as useful as I had hoped. With the weight saved I added two passive wedges on either side of the flipper. Invertabot has a little more speed and a lot more torque now. Click here to see the latest photos. Sept 1, 2003: Invertabot wins the Dragon*Con Robot Battles 12# championship and the 12# Battle Royale. View a Quicktime video of Invertabots fights here. (29 meg download) Fight 1 was against UFO, a large low 3 sided plastic wedge powered by 3 R/C toy car chassis. I simply plowed into UFO broadside at full speed assuming my steel spikes would dig into the plastic skirts. They did and UFO was easily pushed off the platform in both rounds. Fight 2 was against Storm, a small 4 wheel drive bot with a vertical spinner in front. He had wire brushes for wheels. I assumed I could just push him off the platform but he proved resistant and we both went off in round 1. Invertabot suffered some scratches and holes in the sheet metal from the spinner. Also one of the front spikes was bent in the fall. In round 2 I used the flipper at the first opportunity and flipped him off the platform. In round 3 I flipped him over and called for a mobility check. Invertabot wins fight 2. Fight 3 was against a fast low 4 wheel drive invertable wedge called TestBot 2.0 driven by 15 year old Charles Guan. The first two rounds were draws with TestBot 2.0 getting under Invertabot and driving both bots off the edge. The kid is pretty good. In round 3 TestBot drove himself off. Invertabot pushed off TestBot in round 4 and won the first match in the round robin finals. Next I had to fight Death From Below, another 4WD invertable wedge. Invertabot quickly pushed him off in round 1. In round 2 Death From Below immediatly drove himself off and Invertabot wins again. I now had to fight TestBot 2.0 again. He'd have to beat Invertabot twice for the championship. In round 1 TestBot got under Invertabot and pushed him off. Hmmm. This kid is good. In round 2 Invertabot flips Testbot but Invertabot is rammed in the side gets pushed off! TestBot 2.0 wins. This kid is really good. Ok, this is for all the marbles. Best two of three. The crowd was loving it. For some reason the spectators convinced Charles that TestBot runs better upside down! So, he starts the round inverted. Lucky me. He's no longer able to get completely under Invertabot! After some give and take pushing TestBot is shoved off the platform and round 1 goes to Invertabot. Charles wisely decides to start TestBot right side up next time. Round 2 was intense. TestBot got flipped over and both bots pushed each other in a mighty struggle. TestBot is almost pushed off but recovers. Eventually Invertabot got a good hold on TestBot and slowly pushed him off the platform for the victory and much cheering. |
Invertabot Data Sheet |
|
|---|---|
| Size | 21 in(W) x 19 in(L) x 4.25 in(H) |
| Weight | 12.0 pounds |
| Frame | .050 6061 T6 aluminum |
| CPU | Atmel AVR 90S8535 |
| Programming Language |
"C" ( AVR-GCC) Developed on SuSE Linux |
| CAD Software | VariCAD running on SuSE Linux |
| Radio | Linx 900 mhz FM modules (in ham band) |
| Controller | Hacked Logitech Wing Man Rumble Pad |
| Data Link | 9600 baud with CRC error checking |
| Power | 24 volts from 20 AA NiMH 1800 mAh cells. A boost mode switching regulator raises it to 33 volts for high speed crusing |
| Motors | Two R/C car motors rewound for 24 volt operation |
| Motor driver | Custom power MOSFET circuit |
| Motor Current | Software limited to 10 amps max |
| Speed Control | Software generated Pulse Rate Modulation with Back-EMF feedback. |
| Drive System | 4WD using pulleys and worm gears. 30:1 ratio. |
| Tires | Four 4.25 inch diameter R/C car tires |
| Top Speed | 7 feet/sec |
| Primary Weapon | Pneumatic flipper powered by unregulated 800 PSI CO2. Develops 50 pounds of thrust at the flipper tip. Click here to see the math. |
| Secondary Weapon | Hardend tool steel spikes |
| Extras | Infrared opponent detection tied into steering controls. One button auto-attack (tm) |
Invertabot source code and schematics |
|---|
Robot
900 mhz transmitterThis information is supplied in the hope it may be usefull but without any warranty; without even the implied warranty of merchanability or fitness for a particular purpose. |


|

|
|
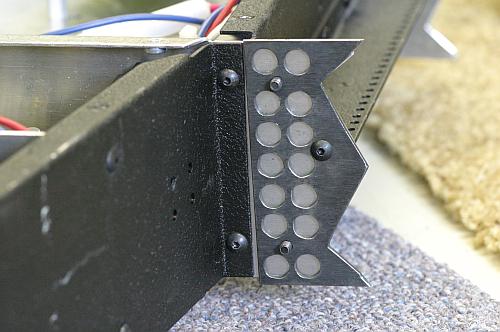
This is one of 8 dual use hardened tool steel spike assemblies They dig into the combat surface when the other end of the bot is lifted preventing opponents from pushing. When the lower spike hits a skirt or wedge it will dig in and prevent going up and over. This is most effective on materials such as plastic and soft aluminum alloys. |

This lever assembly can lift the tip of the flipper/wedge about 3/8 inch by remote control command when it's required to pass over raised seams on the combat surface. |

I use the the same controller with Thrasher. |
Previous page: Amdroid -A 16 oz Combat Robot
Next page: Invertabot Construction Log

{kind=link}
{kind=link}
{kind=link}