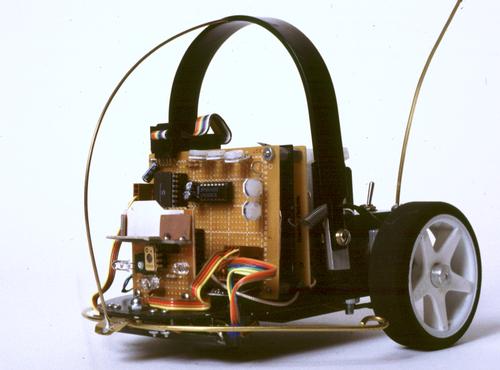
Line Follower Robot
October 1999
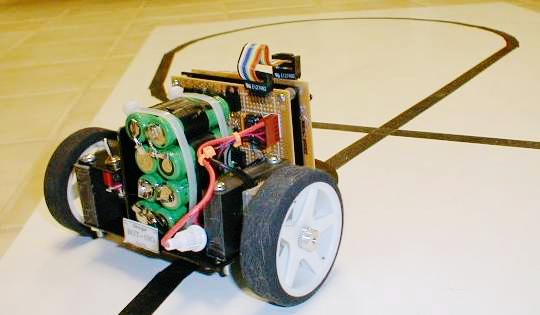
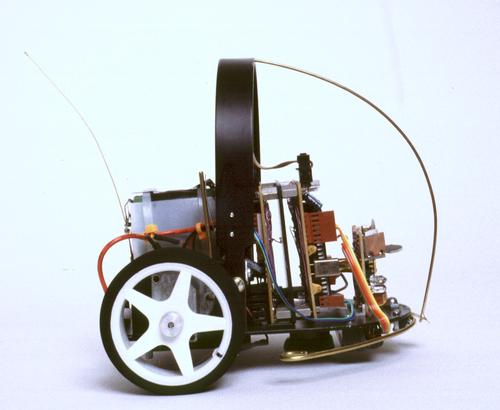
Note: Photograph taken before IR and bump sensors were installed.
This is a line follower robot I have been working on. It will travel the 202 inch long course (black tape on poster board) in 8.5 seconds. It ran the Atlanta Hobby Robot Club course in 6.93 seconds.
In September I added line finding and obstacle avoidance to the firmware and hardware. To find the 3/4 inch black line I added another set of CDS photo cells and LEDs between the rear wheels. This sensor generates an "S-Curve" (voltage over time) when the robot rolls over a line. This signature is detected with a primitive correlator in the firmware. Dark floor areas wider than about 2 inches are ignored.
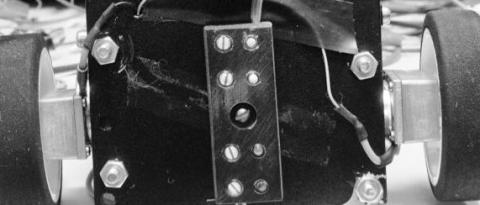
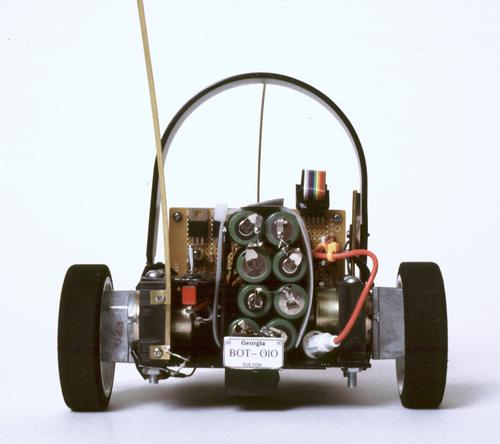
Rear Line Finder
The Line Finder sensor between rear wheels has 4 high intensity LEDs and 4 CDS photocells. The front line tracking sensor is wired the same except it has 6 standard LEDs. The sensor assembly was machined from a block of black PVC. Wiring the CDS cells in series with the signal taken from between them provides an indication of the difference in the light falling on each half.
Rear Line Finder Schematic
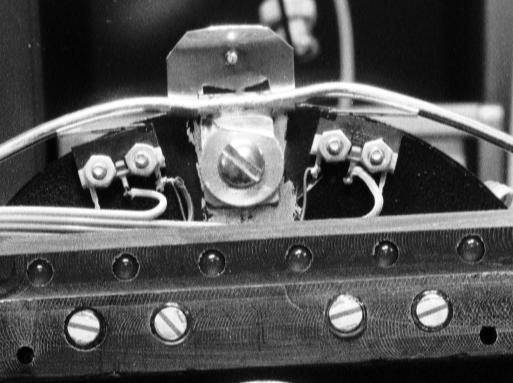
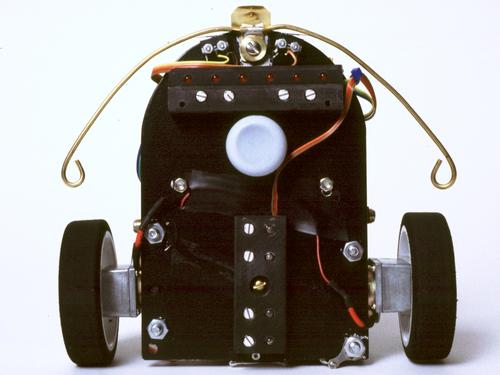
Front Bump Switches and Line Tracker CDS photo cells
The robot now has 3 bump switches to act as backup for the IR obstacle avoidance system.
The robot can be turned loose in a room with the line following course and by randomly wandering around will eventually cross the line, backup to center the rear wheels on the line, then rotate until the front sensors are centered on the line at which time it begins tracking the line at full speed. The robot detects objects in it's path while line tracking and rotates 180 degrees to avoid hitting them.
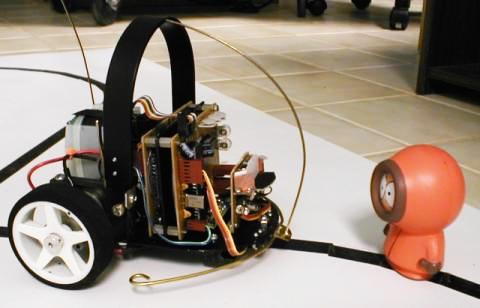
Kenny tests line follower obstacle avoidance sensors.
I entered this robot in the AHRC 2000 Robot Rally Open Competition and won the 2nd place plaque .
 Movie of Line Follower ( Real Player format 320K )
Movie of Line Follower ( Real Player format 320K )
Movie of Line Follower ( MPEG format 2.6 MB )

The links to the source code and schematics have been updated to reflect the changes I have made as of Oct 21 1999.
- The C source code for the PIC 16C74A microcontroller
- An early version written in PIC assembly language (line follower only)
- The C source code for the ASCII NRZ to pulse converter
- The C source for the Linux PC end of the RF Comm link
- Schematic of the H-Bridge motor driver board (pdf format 300K)
- Schematic of photo cells, bump switches and LEDs wiring(pdf format 270K
- Schematic of PIC microcontroller board (pdf format 400K)
- An infrared sensor design for obstacle avoidance.
Previous page: Motors
Next page: Infrared Obstacle Sensor

{kind=link}