Thrasher - 16oz Combat Robot
By Dale Heatherington
March 2004
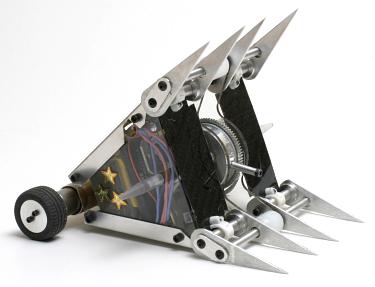

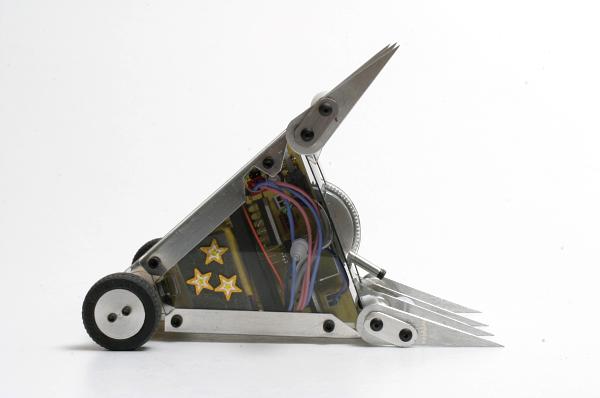
Thrasher is an Ant Weight combat robot built to compete in Ant and Sozbot events.
This is my second ant weight combat robot. My other bot, Amdroid-A has been very successful but has no active weapons and is somewhat boring. To add a little excitement I equipped Thrasher with a unique vertical spinner. It rotates at 1000 RPM at high torque. It has a 15 pound torque limiting clutch to prevent self inflicted damage. It's capable of tossing opponents 8 to 12 inches into the air. The bot is fast, agile and fully invertable.
I did almost all the machine work in my back yard shop. I have a lathe, vertical mill, band saw, drill press, sheet metal brake, shear and other tools. The two main Lexan vertical frame pieces were laser cut at www.pololu.com
| News |
| May 13, 2006
Thrasher wins 2006 AHRC Robot Rally Ant Combat competition |
| Sept 4, 2005
Thrasher wins Dragon*Con Microbattles 2005 |
| Nov. 13, 2004
Thrasher wins Atlanta Area Bot Brawl 2 |
| Sept 5, 2004
Thrasher wins Robot Microbattles at Dragon*Con Atlanta |
| May 29-30, 2004
Thrasher competes at Rocket City Robot Assault in Huntsville AL |
| May 15, 2004
Thrasher wins AHRC Ant Weight Competition |
| April 22, 2004
Thrasher gets a new brain! |
| April 3, 2004
Atlanta Area Bot Brawl Thrasher wins Atlanta Area Bot Brawl at Hobbytown USA! This was a small event and a good way to test the bots battle worthyness. The battles took place in a brand new arena built by Chris Underwood and Lionel Vogt. I lost the first fight to "Inbred Son of Buck-toothed Hillbilly" due to a driving error. I ran a wheel off the edge of the pushout. Doh! This was my first time driving it in actual combat and Thrasher has a lot more steering sensitivity than Amdroid-A. Fortunately this was double elimination so I was able to work my way back to victory through the losers brackets. Next I fought "Alabama Sweeper", a motorized dust pan. Thrasher flipped over the dustpan on the second hit and won by knockout in 15 seconds. Next up was "Inbred Son of Buck-toothed Hillbilly" again. I flipped him once and should have turned off the spinner. Unfortunately I flipped him again which put him back on his feet. Actually he runs both ways up but much worse inverted. The rest of the match was mostly push and shove and went to judges decision. The next two fights were against "Very Crude Ant" by Charles. Yes, the same Charles that almost beat Invertabot at Dragon*Con last year. Because I came through the losers brackets I had to fight him twice to win. Fortunately VCA is slow and has lots of nice flat places for the spinner to bite. Thrasher managed to flip him several times and won both rounds for the Ant weight class victory. The "Rumble" was fun. All the Ants were put in the ring with the last one running declared the winner. Thrasher disabled VCA by inversion then flipped Alabama Sweeper into the pushout bin. Next into the bin were Inbred son of Buck-toothed Hillbilly and Yee Haw. I went back, turned off the spinner and carefully pushed the inverted but still twitching VCA into the bin. There was also an immobile fairy weight bot in the ring just for fun and I carefully pushed that into the bin as well. Now I know what needs to be improved before the next event. The steering needs to be desensitized and some changes need to be made to the front end to help the spinner make contact with opponents. Here's a video of highlights of these fights.(about 8 megs download) |
| Thrasher Data Sheet | |
|---|---|
| Size | 5.75 in(W) x 6.5 in(L) x 5 in(H) |
| Weight | 15.8 oz |
| Frame | .093 in. Lexan |
| CPU | Atmel AVR ATMEGA8535-16JC |
| Programming Language |
"C" ( AVR-GCC) Developed on SuSE Linux |
| CAD Software | VariCAD and Eagle running on SuSE Linux 9.0 |
| Radio | Linx 900 mhz FM modules (in ham band) |
| Controller | Hacked Sony Play Station 2 game controller |
| Data Link | 9600 baud with CRC error checking |
| Power | 14.8 volts from two 7.4v 250 mAh Li-Poly packs |
| Motors | Two 12 volt 674 RPM gearmotors from Stock Drive Products Part# D33S57M35G0011 |
| Motor driver | LMD18200T (2) driven by microprocessor |
| Motor Current | Software limited to 1 amp max |
| Speed Control | 28.8 khz locked anti-phase PWM with signed current feedback. |
| Drive System | Direct 2 wheel drive from gear motor shaft |
| Tires | Two 1.25 inch diameter Lego tires |
| Speed | 60 inches/sec |
| Weapons | Wedges and rotary flipper |
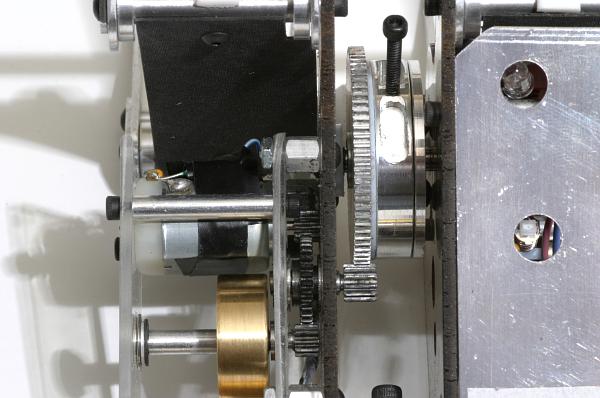
| Weapon Motor | E100 Slot Car motor (12 volt, 24,000 RPM) |
| Weapon Motor Current | Software limited to 600 mA max |
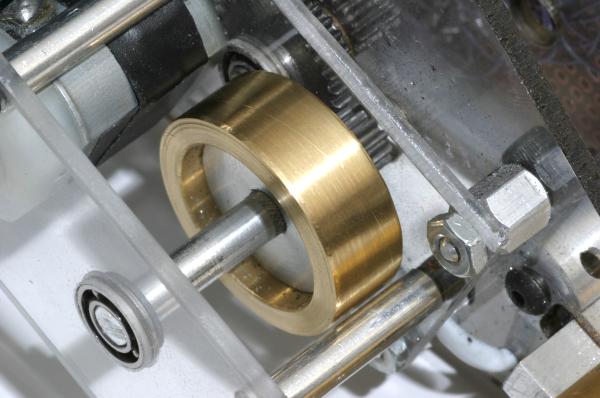
| Flywheel | 1 inch diameter, 3/8 in wide brass. Weighs 0.6 oz. Energy: 6 Joules |
| Weapon Transmission | 21:1 gear train with 15 lb torque limiter |
Thrasher source code and schematics |
|---|
Robot
900 mhz transmitterThis information is supplied in the hope it may be usefull but without any warranty; without even the implied warranty of merchanability or fitness for a particular purpose. |

|
|
|
|
||||
|
|
||||
|
|
||||
|
|
||||

Batteries
The batteries are Li-Poly packs. Two packs are wired in series for 14.8 volts at 250 mAh. I bought them from Robot Marketplace. |
||||

Weapon Motor
I used this cheap slot car motor to drive the weapon. With no load it runs at 24,000 RPM at 12 volts. It takes about 5 seconds to accelerate the flywheel to full speed. Without the flywheel this motor cannot flip an opponent. It's only purpose is to spin up the flywheel which does all the work. |
||||
Rotary flipper at work
This sequence of frames is from an early video demonstrating the effectiveness of the flipper. The wood block weighs 16 ounces. 
Hacked PS2 game controller with transmitter I use the the same controller with Invertabot. |






Previous page: Omega Force 1.0 Rotary Flipper
Next page: Amdroid -A 16 oz Combat Robot
