Trisector Progress Report
|
|
 |
|
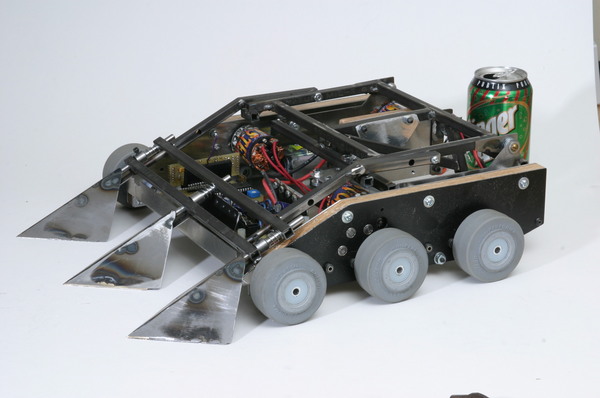
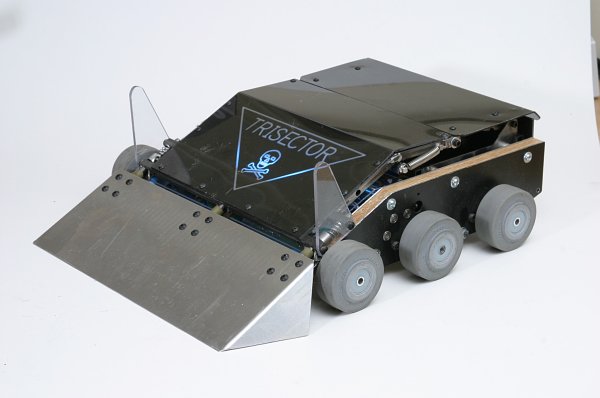
August 13 2005 This is the new robot I'm bulding for Dragon*Con Robot Battles 2005. It replaces the failed Omega Force robot that I started in January. I'm calling it "Trisector". It will fight in the 12 pound class. It's basically a non-invertable flipper bot with self-righting. It has 6 wheel drive powered by 2 Trinity Monster Maxx 14 volt RC truck motors. The electric flipper weapon is powered by a 3rd Monster Maxx motor. When complete the weapon can be used four ways; lifting, flipping, raising wedges to pass over high spots, and self-righting. Click here to see a short RealPlayer video of the prototype electric flipper.
One of the custom gearboxs for 6 wheel drive . All gears are cut from steel gear rod stock. They are pressed on the shafts. I used 12, 24 and 32 tooth gears for a ratio of about 37:1
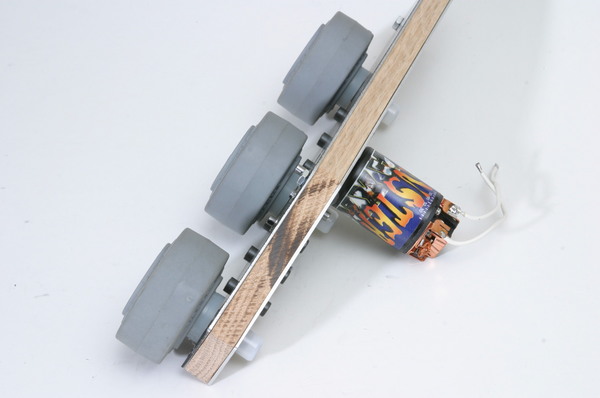
Assembled gearbox. Wood spacer is sandwiched between two sheets of aluminum. 2.5 inch Colson wheels are press-fitted on 3/8 inch shafts with nylon adapters.
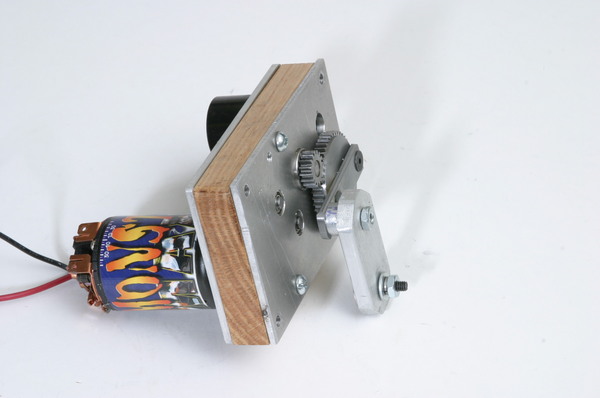
Weapon gear box is 111:1 ratio and uses the same construction as the wheel drive. A precision pot coupled to the output shaft with plastic gears provides position info to the servo controller.
Fully assembled weapon gear box with crankshaft and connecting rod.
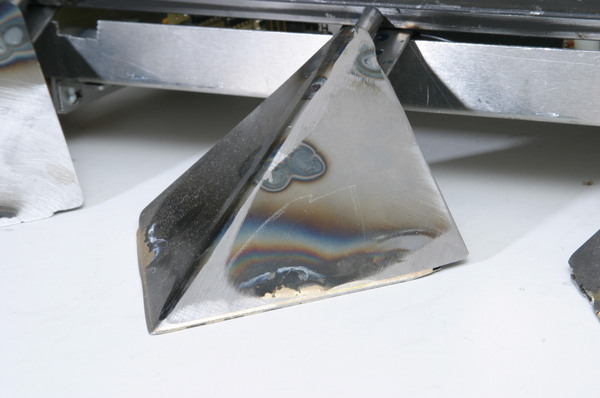
One of the 3 wedges. They are made from .040 thick 4130 chrome-moly steel. Each wedge can rotate a few degrees to maintain a flat footing. They are a little heavy at 4.4 oz each. I may make new ones from thinner stock if time permits. 
Bottom of a wedge. The small flat plate welded to the frame limits rotation. 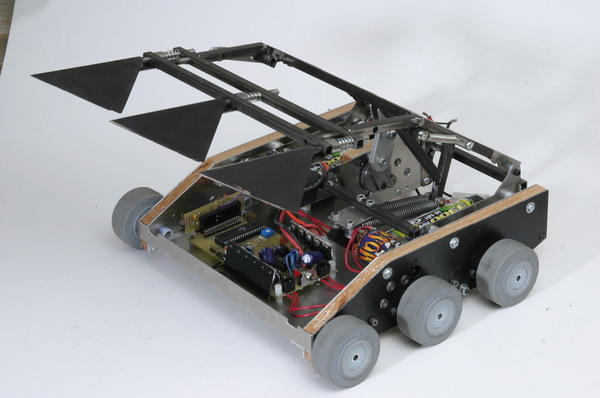
Wedges in full up position. They can be raised in about 200 milliseconds which flips the opponent. Once the servo control board is completed they can be moved to any position at will. 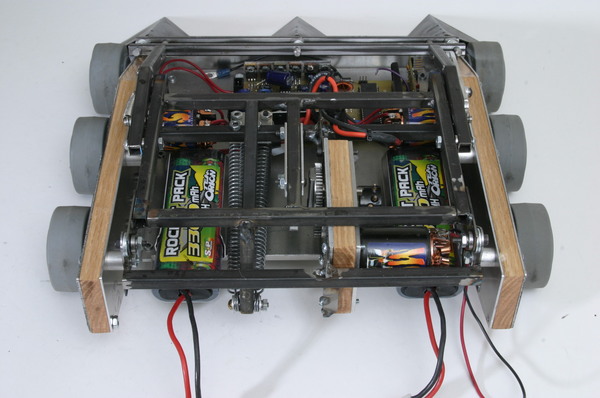
The rear end. August 18, 2005 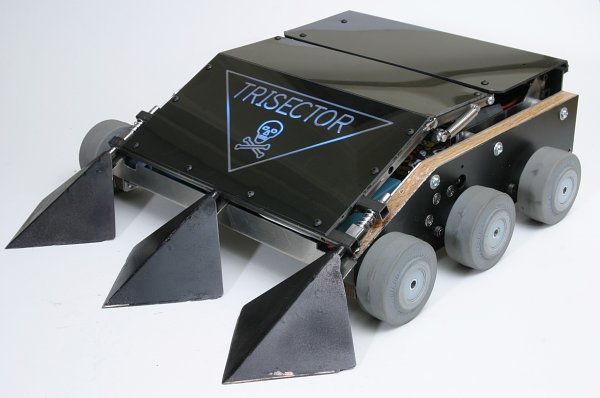
I've completed the .093 Lexan covers. If underweight I'll put in a blue backlight behind the graphic as show here.
August 27 2005 Lots of progress has been made. The high power servo controller has been designed, built and tested. New lighter wedges have been made. The firmware has been mostly debugged and the bot runs pretty good. Of course there were several problems and near disasters. Once, while downloading new code into the microcontroller the bot suddenly powered up the drive motors and ran off the bench and across the room! Now I always put in on blocks while working on it. I've made a short video of some test runs. It's 1.8 megs in RealPlayer format. TrisectorMovie.ra August 31 2005 The past few days have been spent working out bugs and glitches in both control boards and mechanical hardware and reducing weight. Various problems included gears that slipped on the shafts they were pressed onto, slightly bent flipper frame, hole misalignment, and several software bugs that caused erratic lifter operation and unwanted flipper actuation at the moment the transmitter was turned on. I also had to heat treat (heat to red with torch then quench in oil) the 1/4 inch 4130 steel tubing that holds the wedges to prevent bending when crashing into things. Trisector is now 1 oz under the 12# limit! I believe this bot is now ready! September 3 2005
Interchangable weapons Today I spent a few hours making a conventional wide wedge from .050 aluminum. It attaches exactly the same as the small individual steel wedges and only weighs 0.6 oz more. I can change weapons in about 3 minutes in case of damage or it looks like the other may be better against a particular opponent. September 6 2005 I'm back from Atlanta DragonCon Robot Battles 2005 where Trisector got the ultimate test - real combat! This year the combat surface/stage was littered with 1 x 1/4 steel strips and small stuffed animals to make life difficult for wedges and hopefully spawn new and more interesting robots. It worked! This years bots were much better than before and the matches more exciting. Trisector did well but didn't reach the finals. He defeated all opponents except the powerful Probulator, which won the 12# class. My main problem was with driving and controlling the flipper at the same time. It had to be raised to go over the steel strips but usually lowered to engage the opponent. I managed to flip Probulator 12 times in one match but he won after I drove on top of him and got dumped off the stage. After viewing the videos it's pretty clear I should have used "lifter mode" instead of flipping. Here is a link to a 14 meg RealPlayer video featuring all of Trisectors matches. Enjoy! |


Previous page: Light Seeking Spinner
Next page: Omega Force
