
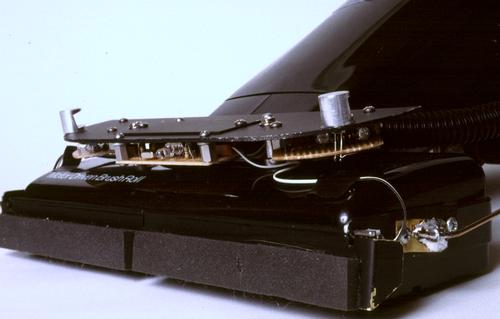
The front of the vacuum robot is equipped with infrared
emitters. There are three sets to cover areas directly ahead and
to both sides. The reflected infrared pulses are picked up by the
sensors on top of the robot show below. Each of the 3 sets has both
high and low power emitters. The low power emitters are used to avoid obstacles.
The high power units are used to send pulses up to 15 feet to the Homing
beacon transponder . Also seen here are
the left and right foam padded bump switch assemblies.

The sensors are the type used in IR remote controls for VCRs and TVs. These are designed to respond to IR energy which has been chopped at a 40 kHz rate. Note there are both left and right sensors. These are used to guide the robot to the homing beacon as well as avoiding obstacles. Also seen here in front of the IR sensors is the top bump switch assembly.
Since there are only 2 IR sensors used for detection
of 5 IR emitters and the homing beacon I had to devise a means of discriminating
between all the sources. This is done with time slots. Each
emitter is only active during it's assigned time slot of about 500
microseconds. The receivers know which emitters signal they are receiving
based on the time slot value. The homing beacon's response pulse
is delayed 3500 microseconds to make sure any false activaitons don't fall
on any of the sensor time slots.
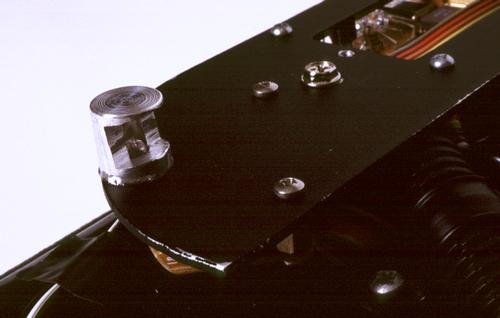
There are left and right emitters that are line of site
to the top mounted IR sensors. When the robot attempts to roll under
furniture at least one of these emitters will become hidden and the beam
broken. The main control processor then issues a back out command.
{kind=link}